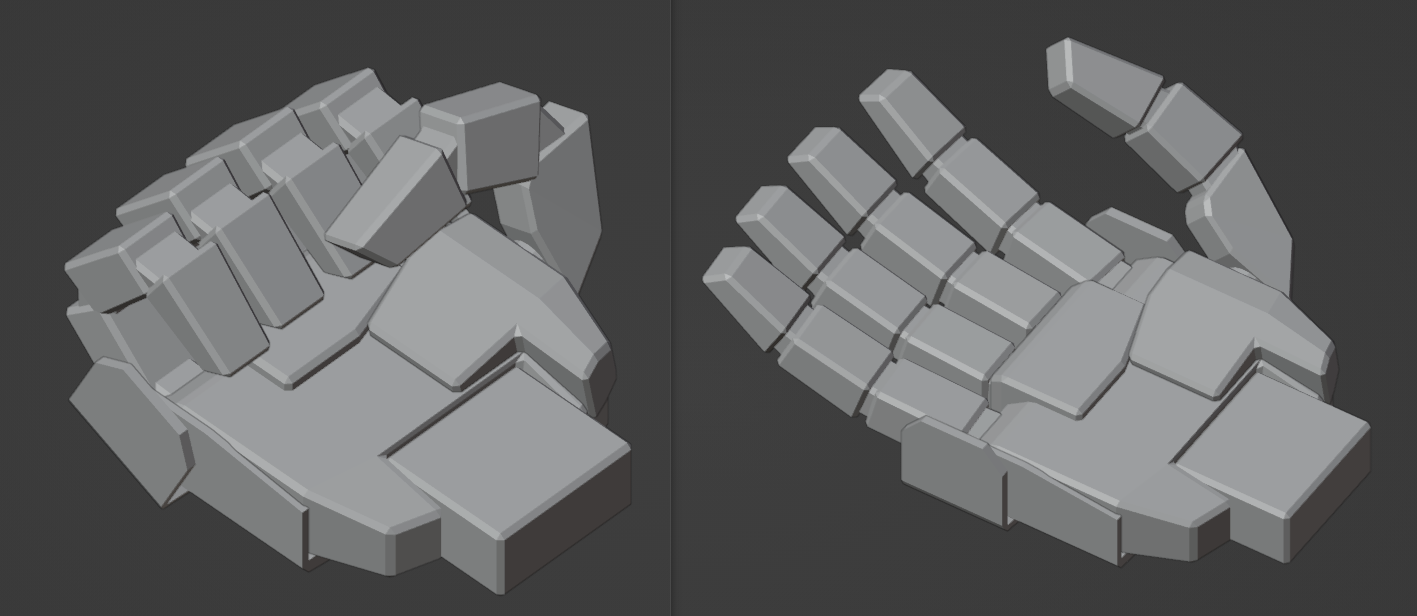
ロボットのハンドパーツ(マニピュレーター)を3Dモデリングする時、人差し指〜小指はすぐモデリング出来たけど、親指の付け根のトコはどうなってんだ?と、思う人は多いんじゃないかと思います(経験則)。
メカモノの関節は、たいていはモーターの回転運動なので明確で分かりやすいのですが、親指だけは特殊で、接続をどう構成したらよいか安定しないんですよね。
インターネット上で見かけるモデルやイラストを参考に、ロボットハンド親指の構成パターンを羅列してみました。
※スクショの一部画像がWebp形式に変換されており、ブラウザ(特にChrome系)によっては色が落ちた画像が表示されるようです。「名前をつけて画像を保存」からPNG画像を保存してもらえると元画像を取得できます。
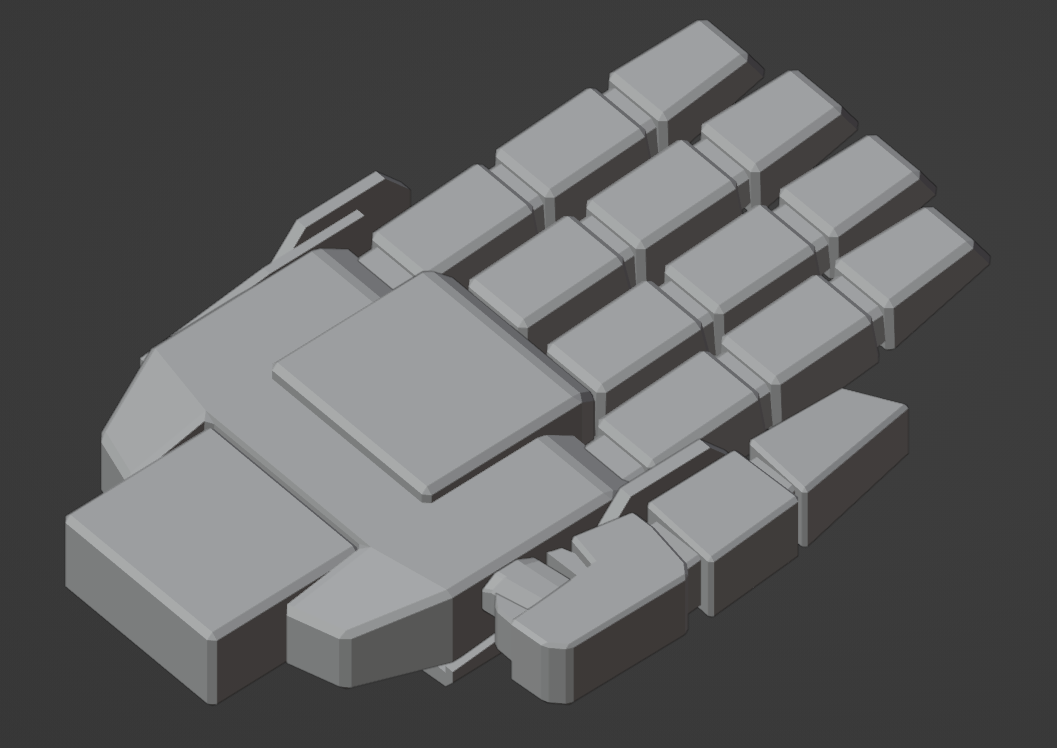
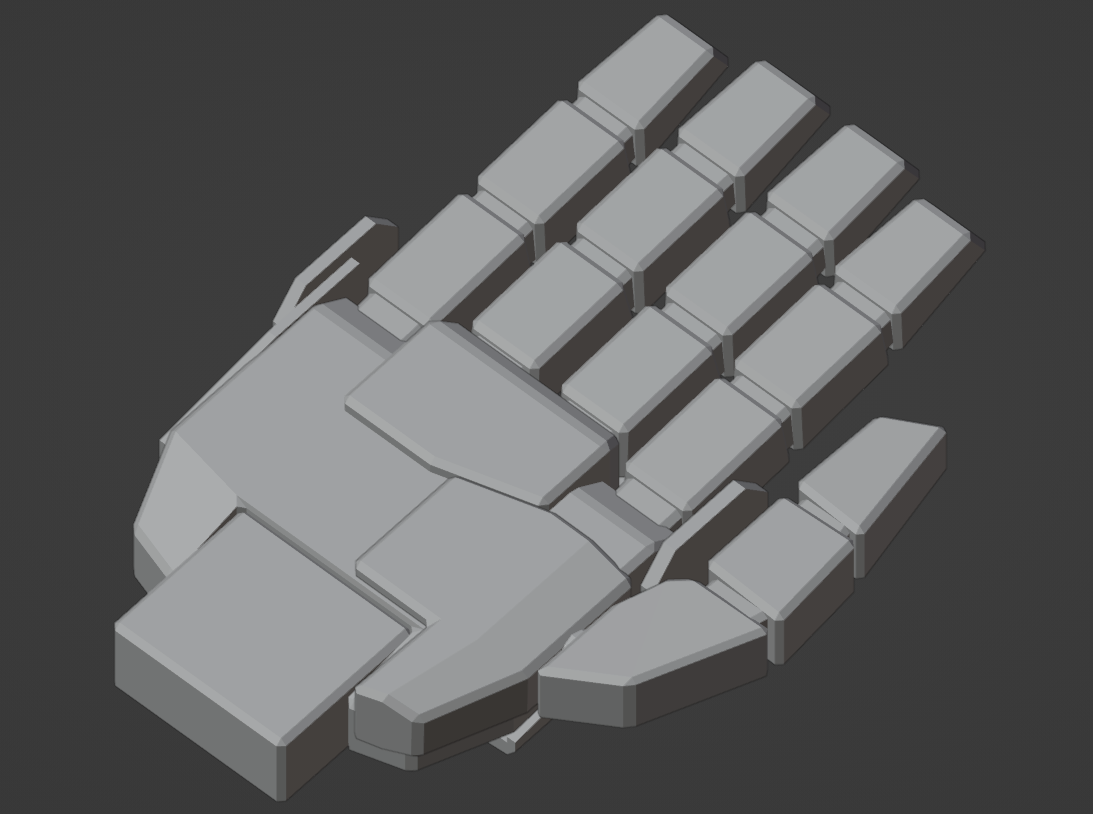
基本の関節構成
関節の構成としては、こんな感じの3自由度が基本かと。親指と掌の間は繋がっておらず、フワフワ浮いている状態ですね。ラフなモデルをとりあえず立ち上げたいときは、これでもよいんじゃないでしょうか。
んで、ここからディティールを詰めるときに、親指を接続するためのメッシュをどう作ればよいかが問題になります。
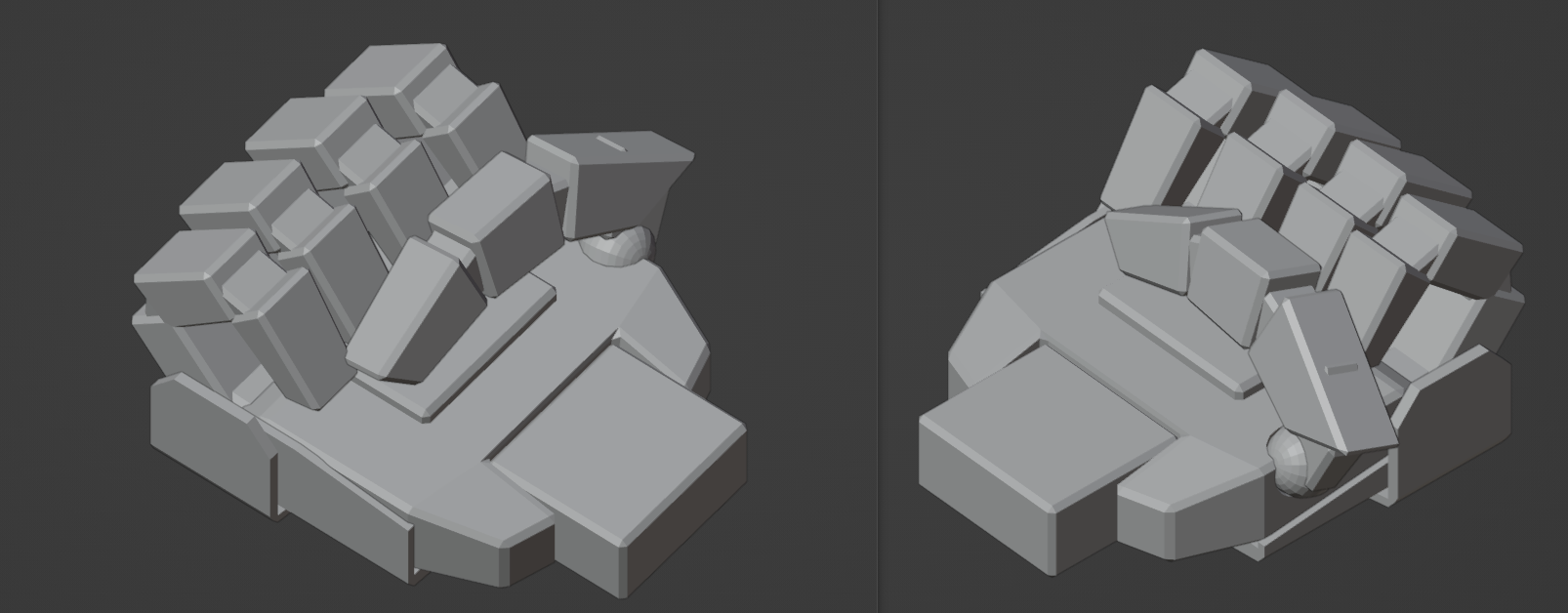
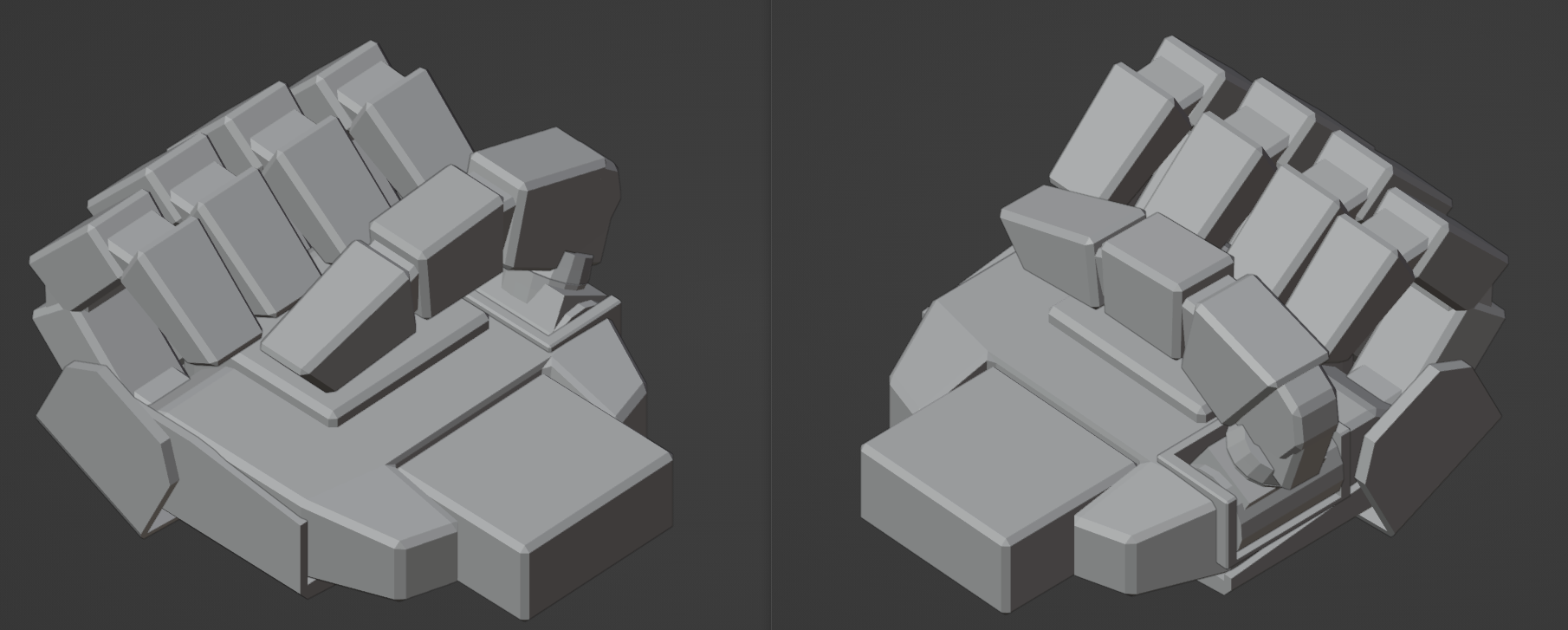
球体関節
親指と掌が球体(ボール)で接続されているモデル例です。根本のボールが2あるいは3つの自由度を受け持ちます。
ボーンを埋めるのは簡単そうですが、自由に動きすぎると、簡単に破綻もしそうですね。ローカル軸の向きと回転角度の制限をうまく作り込んでやる必要がありそう。また、球体関節を採用する場合は、人差し指から小指も含めて、全ての関節に球体関節を適用させないとバランスが悪くなりそうですね。
立体物(プラモ等)風のボールジョイント。ボールの回転中心が掌のより内側へ移動します。
↓こういう掌の穴からニョキっと生えてるようなやつもある意味、球体の関節が中に入ってるパターンですかね。
手書きのロボットアニメで開き手のシーンを一時停止すると、このパターン使ってるのをよく見る気がします。
モーター3個連結
3自由度を3のモータを連結して実現してるケース。各ボーンには1軸のみ回転するように回転制限を設定すればよいので、設定は簡単で分かりやすいですね。回転する部分に素直に骨を埋めるだけなので、モデルの破綻も起こりにくいかと思います。
モノを握るための空間を作りやすい印象。
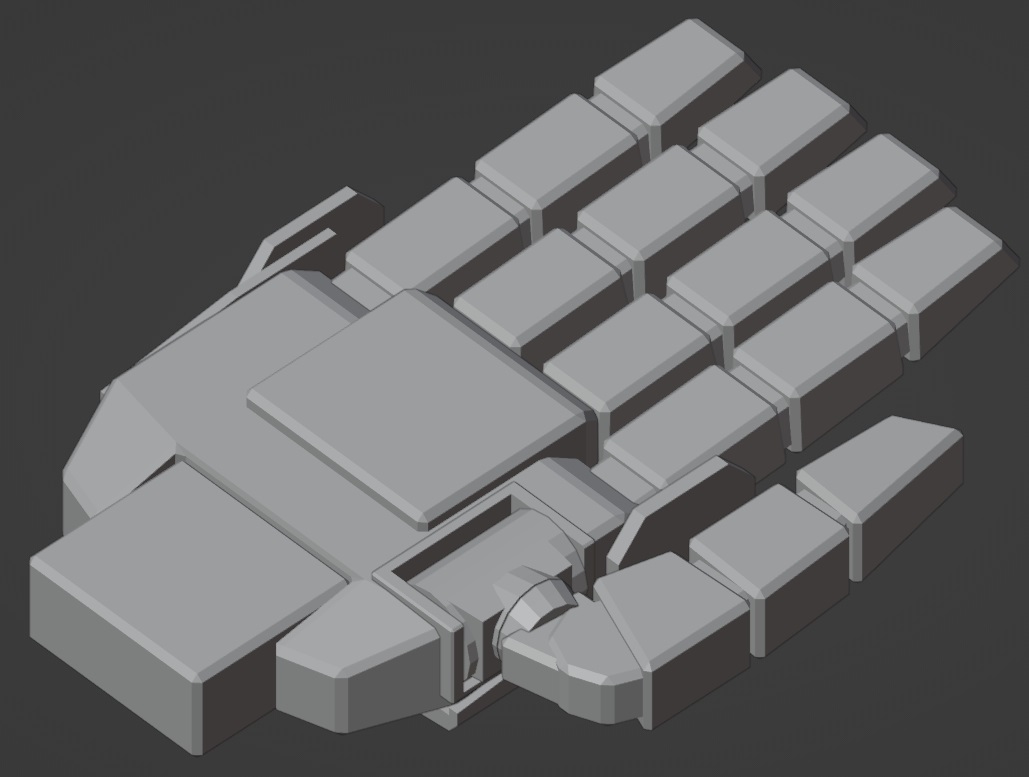
回転軸が親指側にある版。
たまに見かけますが、(デザイン次第ですが)どうしても掌と接続してるジョイント部分の強度が気になってしまう...
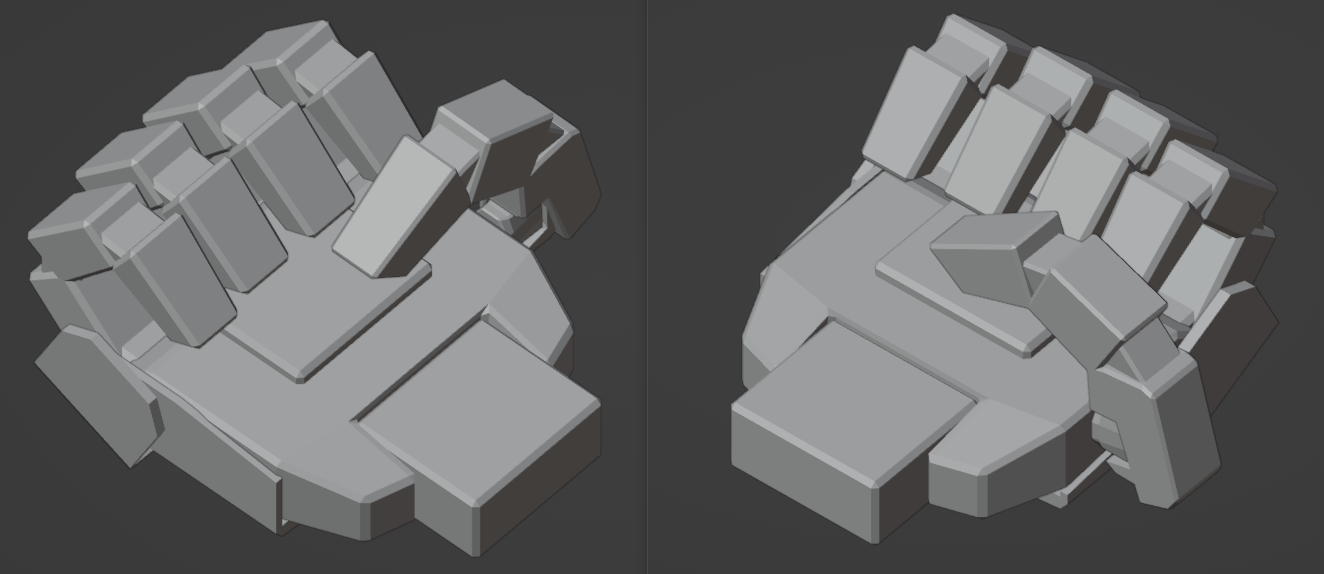
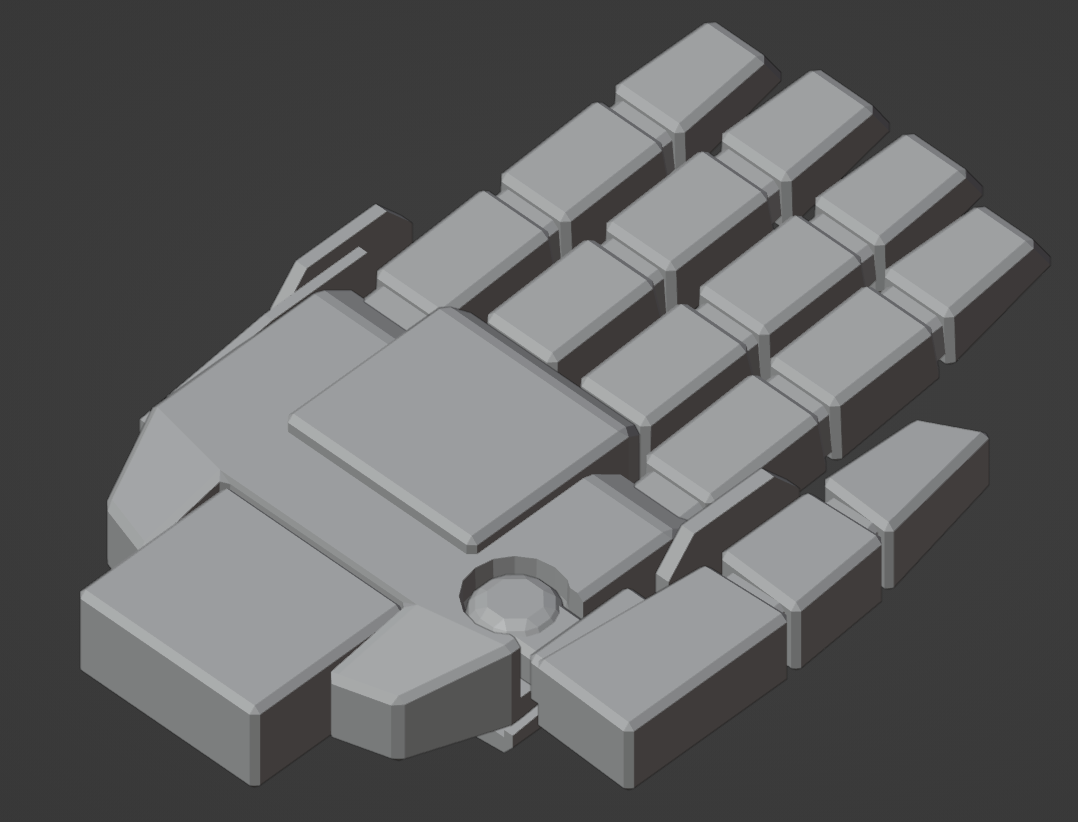
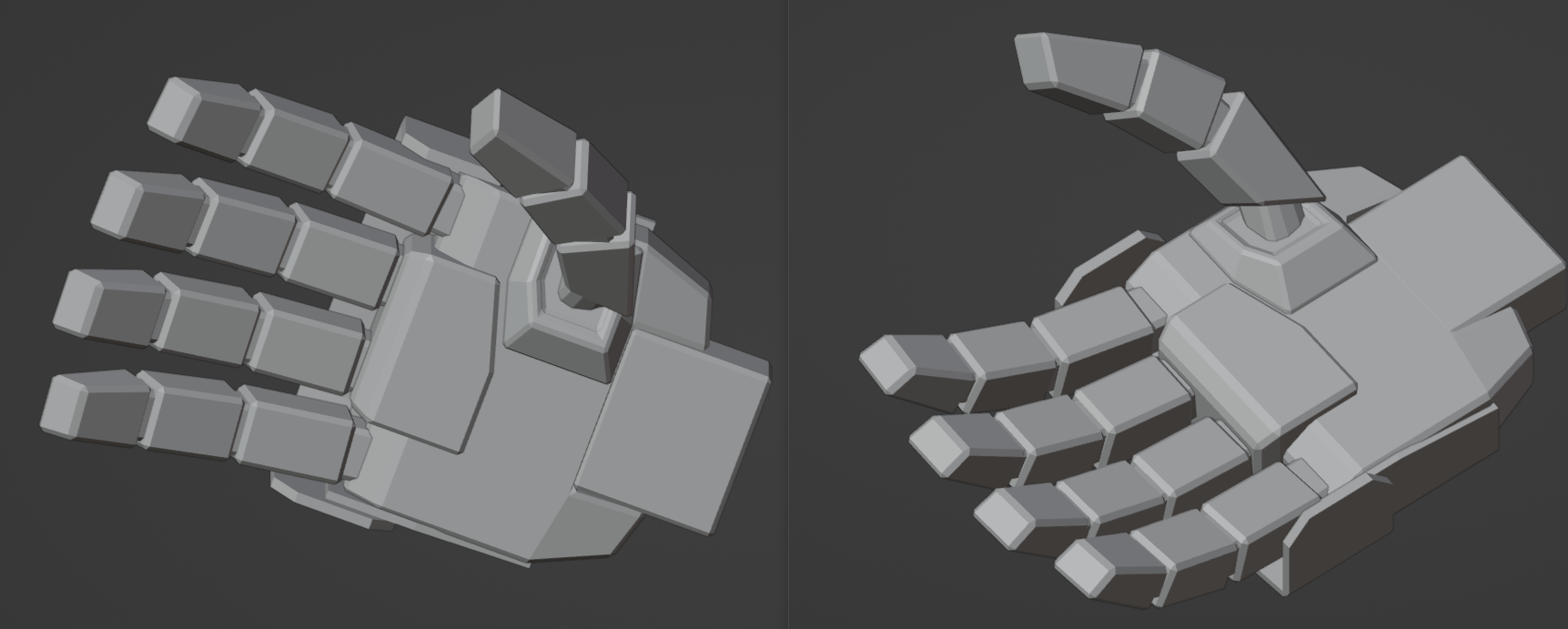
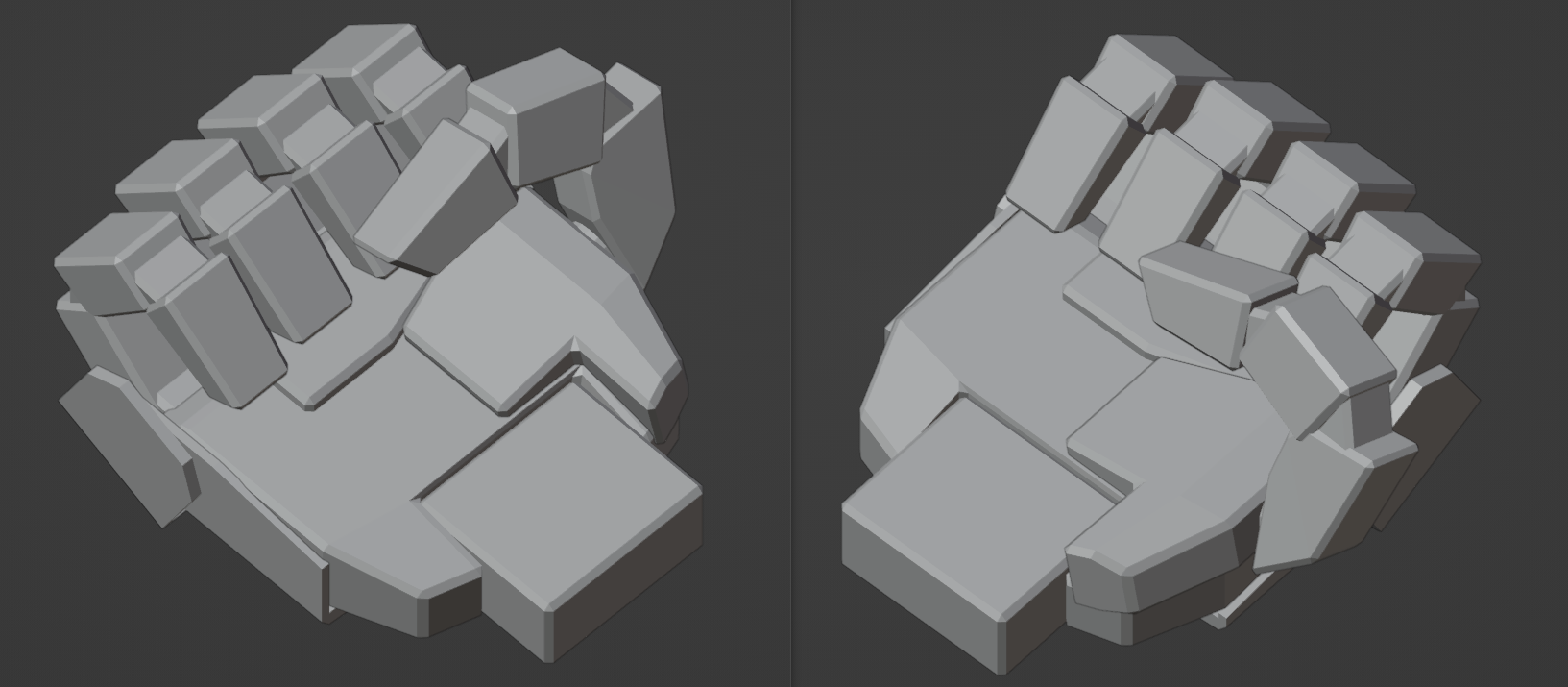
シリンダで押し出し
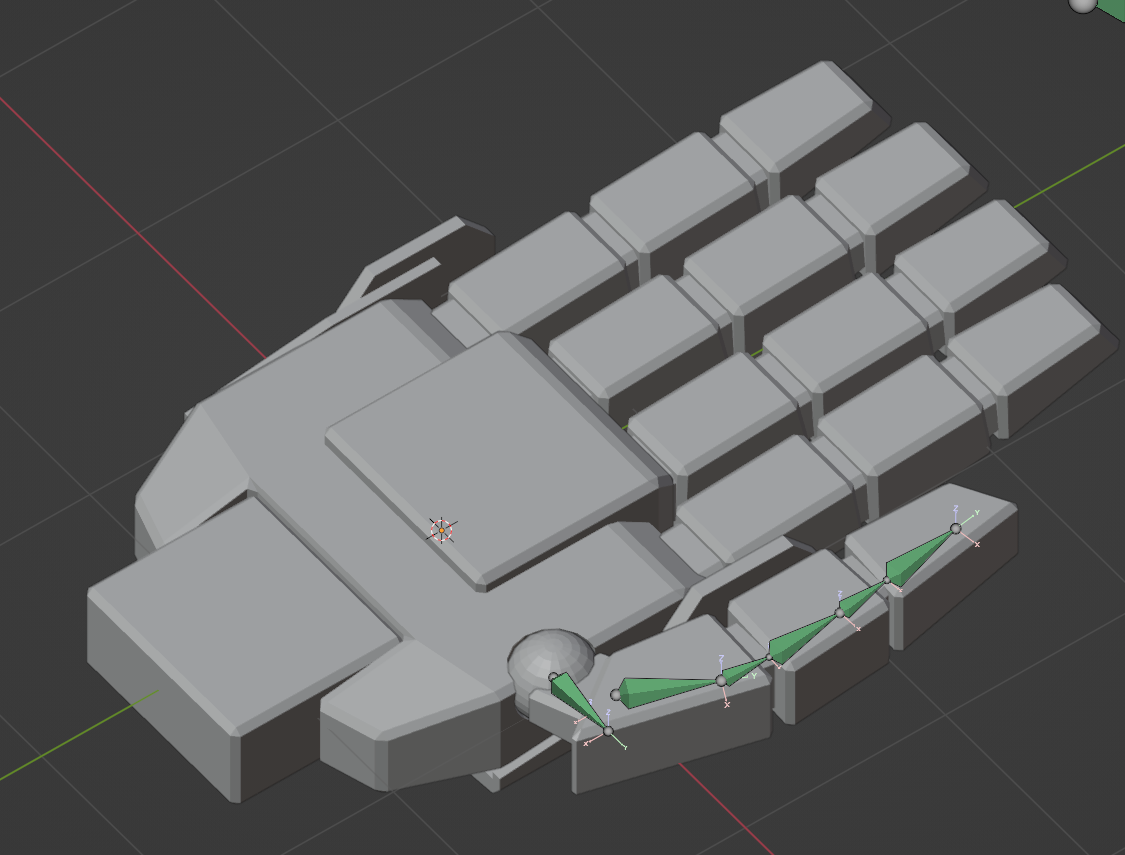
母指球の部分が、掌の内側から油圧シリンダか何かで押されて動くようなイメージです。シリンダなのでスライド運動なの?と最初は思ってしまいますが、回転軸が親指の根本か、手のひらの中央かの違いだけで、自由度の構成はモータと一緒ですね。
こちらも、各ボーンには1軸のみ回転するように回転制限を設定すればよいので、設定は簡単で分かりやすいですね。
母指球に相当するパーツごと動かすので、見た目は人の手に一番近い形になるんじゃないでしょうか。
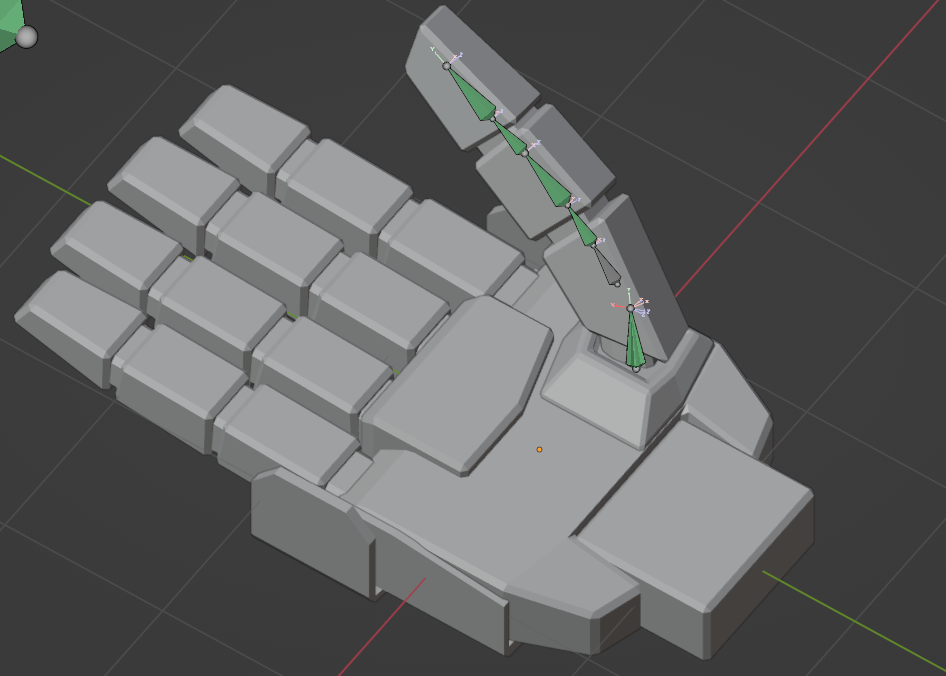
親指を閉じたときに破綻しやすいと思いますので、稼働範囲の設定とモデルの作りこみが必要ですね。
スクショのモデルは2自由度

コメント